


【自有技术大讲堂】相位测量轮廓术
相位测量轮廓术(Phase Measuring Profilometry,PMP)因其精度高、稳定性好、易在工程上实现等优点被广泛使用,相位测量轮廓术是采用正弦条纹投影和相移技术相结合的一种3D量测方法。其实现方法是通过一系列有固定相移的条纹图像来计算含有被测物体表面三维信息的相位值,进而得到物体高度信息。通过投影仪将多帧有一定相位差的正弦条纹图案投影到参考平面上,当参考平面上放置被测物体时,由于物体表面有高度变化,使原本平整的正弦条纹图扭曲变形,从而使得正弦条纹图的相位发生变化。因此被测物高度的信息便被记录到被调制的正弦条纹图中。通过相机获取变形条纹信息,之后解调相位并完成物体三维形貌的重建。
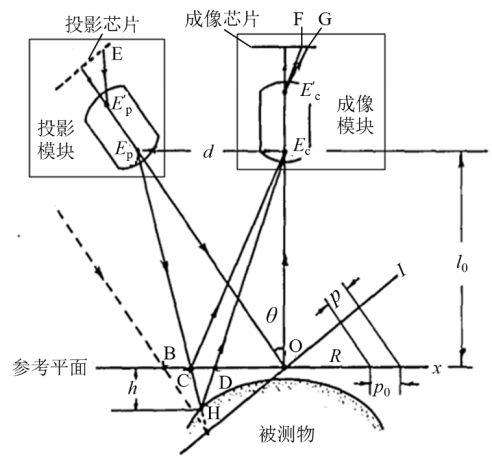
相位测量轮廓术所使用的光机硬件主要有投影模块和成像模块,成像模块的光轴与参考平面垂直,交参考平面与点O,且参考平面与成像芯片平行。左侧为投影模块,投影模块倾斜放置且与成像模块光轴之间夹角为θ,投影光轴与参考平面交于O点。Ep和E p分别表示投影光学系统的入瞳和出瞳位置,Ec和E′c分别表示成像光学系统的入瞳和出瞳位置,EpEc为基线距离d,OEc为成像模块的工作距l0。
p分别表示投影光学系统的入瞳和出瞳位置,Ec和E′c分别表示成像光学系统的入瞳和出瞳位置,EpEc为基线距离d,OEc为成像模块的工作距l0。
具体高度求解过程如下:在投影芯片上加载出灰度呈正弦分布的条纹图,位于投影芯片上的像素点E发出的光线经过投影模块投影到参考平面上的C点,若物体与参考平面等高,则由C点反射的光线经过成像模块到达成像芯片,成像在G像素点。若是被测物体在此处低于参考平面的高度,则光线经过C点,投影到被测物体的H点上,由H点反射后,光线经过参考平面上的D点并最终成像到成像芯片F的像素点。由此可见,投影芯片上同一个像素点,由于被测物体高度调制,使得在成像芯片上成像位置不同,这也代表了F点与G点的相位变化。通过两者相位的变化,可以求解出物体所对应的高度,具体求解公式[1]如下:
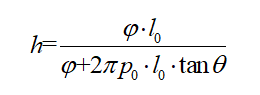
其中,φ为F点和G点间相位差,p0为参考面上的条纹空间频率。
由上式可以看出只需要解出与参考平面上对应点的相位差,并带入相关的结构参数,就可以求出物体高度,接下来就需要求解出点F与点G之间相位的偏移。
相位的偏移可以通过相移法求解相同频率正弦条纹图案的相位主值,再通过空间或时间相位展开算法求解出绝对相位,从而得到相位偏差,进而求解出物体高度。
3D结构光检测的是一个空间范围内物体的三维形貌,其在水平x、y和高度z方向均有测量范围。因此,其在水平x,y方向及高度z方向均有精度的要求。使用相位测量轮廓术进行三维测量时,其测量精度一般取决于投影条纹的密集程度,成像模块的分辨能力,算法模型准确程度以及标定准确性等因素。体现到光机系统硬件指标参数上,便是投影分辨率与成像分辨率,及结构光相位检测精度。
投影分辨率是投影芯片上一个像素点投影到参考平面上对应的像素大小,该指标可以通过投影镜头的放大倍率和投影芯片单个像素点的大小计算得出。
成像分辨率是成像芯片上一个像素点对应参考平面的像素点大小,该指标可以通过成像镜头的放大倍率和成像芯片的像素点大小计算得出。
3D结构光检测系统准确获得被测器件三维轮廓的前提是成像模块要能清晰分辨被物体调制后的条纹图案,根据奈奎斯特采样定律[2],成像分辨率要小于投影分辨率的一半,即在长度方向上成像芯片至少有两个像素点解析投影芯片上一个像素点。此为投影分辨率与成像分辨率之间的关系。
高度方向的精度分析,可以由上式微分得到:

其中,Dφ为相位检测灵敏度,l0为成像模块物距,p0为参考平面上条纹空间频率,θ为投影模块光轴和成像模块光轴之间的夹角。
由上式可以得到:
(1) 相位检测灵敏度Dφ越高,Δh越小,z方向检测精度越高。
(2) 投影模块光轴和成像模块光轴之间的夹角θ越大,Δh越小,z方向检测精度越高,但是过大的夹角会使投影模块景深不足,使投影到参考面上的清晰条纹区域变小。
(3) 条纹的空间频率p0 (由x、y方向的检测范围和正弦的周期数决定) 越大,Δh越小,z方向检测精度越高。但需要注意的是,受限于奈奎斯特采样定律,过分增加条纹的空间频率,会使得成像分辨率随之减小,成像模块放大倍率提高,会使得景深变小,z向检测范围减小。
(4) 工作距l0虽然对Δh有影响,但由几何光学关系可知,其主要影响的是放大倍率,也就是通过影响成像分辨率来影响z方向的测量精度。
参考文献:
- 韩旭. 基于时间相位解包裹的条纹投影三维测量方法研究[D]. 南昌航空大学, 2019.
- 苏显渝. 信息光学.第2版[M]. 科学出版社, 2011.







