


计算机视觉-相机内参数和外参数
相机内参数是与相机自身特性相关的参数,比如相机的焦距、像素大小等;
相机外参数是在世界坐标系中的参数,比如相机的位置、旋转方向等。
相机标定(或摄像机标定):
一句话就是世界坐标到像素坐标的映射,当然这个世界坐标是我们人为去定义的,标定就是已知标定控制点的世界坐标和像素坐标我们去解算这个映射关系,一旦这个关系解算出来了我们就可以由点的像素坐标去反推它的世界坐标,当然有了这个世界坐标,我们就可以进行测量等其他后续操作了~上述标定又被称作隐参数标定,因为它没有单独求出相机的内部参数,如相机焦虑,相机畸变系数等~一般来说如果你仅仅只是利用相机标定来进行一些比较简单的视觉测量的话,那么就没有必要单独标定出相机的内部参数了~至于相机内部参数如何解算,相关论文讲的很多~
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)
相机标定的目的是确定相机的一些参数的值。通常,这些参数可以建立定标板确定的三维坐标系和相机图像坐标系的映射关系,换句话说,你可以用这些参数把一个三维空间中的点映射到图像空间,或者反过来。
相机需要标定的参数通常分为内参和外参两部分。外参确定了相机在某个三维空间中的位置和朝向,至于内参,可以说是相机内部的参数(这好像是废话...笑),我觉得需要引入一点光学的东西来更好地解释一下。现有的相机都至少包含一个光学镜头和一个光电传感器(CCD或CMOS)。
通过镜头,一个三维空间中的物体经常会被映射成一个倒立缩小的像(当然显微镜是放大的,不过常用的相机都是缩小的),被传感器感知到。
理想情况下,镜头的光轴(就是通过镜头中心垂直于传感器平面的直线)应该是穿过图像的正中间的,但是,实际由于安装精度的问题,总是存在误差,这种误差需要用内参来描述;
理想情况下,相机对x方向和y方向的尺寸的缩小比例是一样的,但实际上,镜头如果不是完美的圆,传感器上的像素如果不是完美的紧密排列的正方形,都可能会导致这两个方向的缩小比例不一致。内参中包含两个参数可以描述这两个方向的缩放比例,不仅可以将用像素数量来衡量的长度转换成三维空间中的用其它单位(比如米)来衡量的长度,也可以表示在x和y方向的尺度变换的不一致性;
理想情况下,镜头会将一个三维空间中的直线也映射成直线(即射影变换),但实际上,镜头无法这么完美,通过镜头映射之后,直线会变弯,所以需要相机的畸变参数来描述这种变形效果。
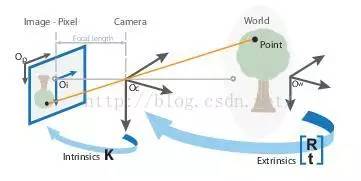
1.外参数矩阵。告诉你现实世界点(世界坐标)是怎样经过旋转和平移,然后落到另一个现实世界点(摄像机坐标)上。
2.内参数矩阵。告诉你上述那个点在1的基础上,是如何继续经过摄像机的镜头、并通过针孔成像和电子转化而成为像素点的。
3.畸变矩阵。告诉你为什么上面那个像素点并没有落在理论计算该落在的位置上,还tm产生了一定的偏移和变形!!!







