


【自有技术大讲堂】移相干涉测量技术介绍
1、引言
光干涉测试技术由于能够实现波长量级的非接触式测量而在科研、生产中得到广泛应用,然而传统干涉仪需要依靠干涉条纹形状的判读分析被测相位,自Buring等人1974年提出移相干涉技术(Phase Shifting Interferometry, PSI)以来,从干涉图中高精度提取相位信息已成为可能[1]。PSI旨在传统干涉仪中加入移相模块,通过“移相”对干涉场进行调制,采集多帧移相干涉图后,通过移相算法提取被测件的压包相位,后续通过解包裹算法获得完整的解包相位。
2、移相干涉技术
2.1 移相干涉术的基本原理
干涉是波动光学中的经典现象,产生干涉现象的前提是相干光,即频率相同、振动方向相同、具有固定相位差的光,假设参考光与测试光的波前分别表示为[2]:

其中 与
与 表示两束光的振幅,
表示两束光的振幅, 与
与 表示为两束光的相位,
表示为两束光的相位,
 表示空间中点的坐标,
表示空间中点的坐标, 表示引入至参考光中随时间变化的移相量,即参考光与被测光的相对移相量。由干涉理论,两束光相干叠加后产生的光强为:
表示引入至参考光中随时间变化的移相量,即参考光与被测光的相对移相量。由干涉理论,两束光相干叠加后产生的光强为:


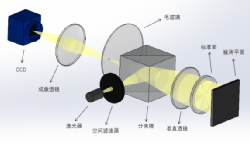
图1 菲索干涉仪光路图
2.2 移相器
移相干涉术的移相是要通过移相器来实现的[4]。移相的方法有很多种,现在还在不断地发展。偏振法、波长移相法和压电晶体移相法是目前国际上的通用方法,其中,压电晶体移相法是最通用的移相方法。它利用压电晶体的逆压电效应,通过控制压电晶体上的电压来控制压电晶体的位移,其精度达到0.01 ,完全满足移相的精度要求。
,完全满足移相的精度要求。
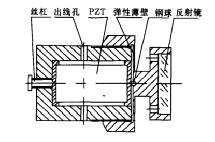
图2 压电晶体移相器的单元结构
移相器在使用前需要进行伸长量的标定,一般采用时域傅里叶变换算法。算法基本原理为:在接收器显示的干涉图中选择某些固定的像素点,当移相器的驱动电压线性上升时,记录上升过程中像素点的光强变化数据,且这些像素点处的光强与驱动电压的关系应为余弦曲线,然后将得到的余弦信号进行傅里叶变换,得到相位与电压的关系曲线,就可以标定移相器伸长量与电压的关系。
2.3 四步移相算法
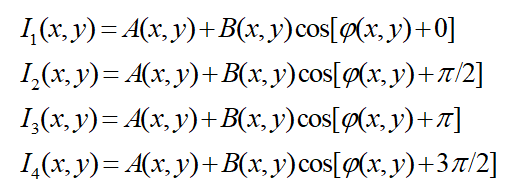
四步移相法是一种经典的定步长相位提取算法,假设四帧移相干涉图之间的移相量均为π/2,且第一帧移相干涉图的相位为0,则后三张移相干涉图的相位分别是π/2、2π、3π/2,四帧干涉光强可写为:
被测相位可由下式求得:
由上式求得的相位分布会因反正切的特性被包裹在(-π, π)之间,后续可通过解包裹算法解的最终的相位信息。
2.4 相位解包算法
通过相位提取算法解得的相位分布受反正切函数的影响,被折叠在(-π, π)之间,在相位值抵达反正切函数值域边界时,会产生相位突变,形成压包相位,效果如图3所示。为将被测面形的真实相位连续地展现出来,必须使用解包算法对压包相位进行解包裹处理,通过完整地解包相位获得被测件的面形信息。
对于压包相位而言,就如同图中的红线所示,当相位在抵达(-π,π)时,之后的相位会±2π回到以回到(-π,π)之间,即出现截断相位。为恢复成连续相位,需从最初的像素点出发,遍历所有像素,比较前后两个像素对应相位值的大小,如果前后两个相位值之差的绝对值大于π,则出现截断相位,之后判断该处与最初的像素点相隔k个周期,并判断前后两相位值的大小,若前相位大于后相位,则使该处之后的相位值均加上2kπ以展开成真实相位,反之,则减去2kπ。
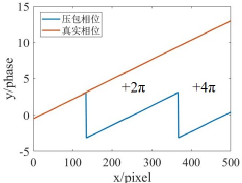
图3 一维解包裹示意图
3、仿真例子
图4为移相间隔为π/2的四帧干涉图,第一帧移相干涉图的相位为0,则后三张移相干涉图的相位分别是π/2、2π、3π/2。
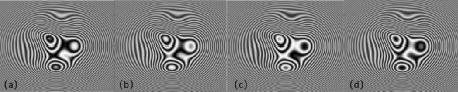
图4 四帧移相干涉图
然后通过四步移相算法提前干涉图中的相位分布,再通过解包裹获得如图5所示物体真实的相位分布。
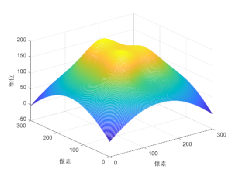
图5 物体真实的相位分布








