


【自有技术大讲堂】线扫相机常用的多线技术介绍
近些年,随着线扫相机的普及与应用,越来越多的行业,在机器视觉应用方案中,使用线阵相机来替代面阵相机实现降本增效的目的。本文将着重描述线阵相机常用的多线成像技术。
线阵相机,顾名思义,其传感器面与面阵相机不同,成单条线型结构。每次曝光拍照过程中,面阵相机诸如常见4096*3000类型,为一次成像12M图像。而与之相对应,线阵相机则有较大差别。线阵相机单次拍摄仅拍摄单行图像,倘若使用采集软件进行采集,物体处于静止状态,则对应图像为单行图像的不断逐行累加,唯有待测物随着芯片面垂直方向运动,且匀速或硬触发模式下分倍频正确,图像方能呈现正常。如下图示例所示。

图 1 线阵相机采集效果图
如上述所示,那么线阵相机正常使用只需要单行数据,即1行像元芯片即可。为什么相机厂商仍然要退出2行、4行、8行等款相机呢?
这里就涉及到线阵相机常用的多线技术介绍了。在了解线阵相机常用多线技术之前,我们需要了解线阵相机的外触发模式。
线阵相机常用的外触发模式分为帧触发模式与行触发模式。
帧触发模式,即选用帧触发信号触发,一般用于决定一张图片采集起点的触发,常见为光电门或伺服电机产生的触发信号,多为单端信号,就像我们面阵相机的触发一样。
行触发模式,即选用行触发信号触发,一般用于决定相机每一行采集起点的触发触发,常见为编码器产生的触发信号,多为差分信号。
在实际运用过程中一般采用帧触发信号触发图像开始采集,行触发信号触发相机,保证相机随着编码器位置而逐行获取数据,以此来保证图像形状的稳定,不至于由于速度不一致导致图像拉伸变形。
而线阵相机常用的多线技术一般有TDI技术、分时频闪技术、长短曝光技术。[1]这三项多线技术均涉及到外触发来实现。
TDI (Time Delayed and Integration)本质上是一种扫描技术,其帧转移器件中的一维线阵像素与待成像物体的运动对准,且与待成像物体的运动同步,随着图像从一行像素移动向另一行,积分电荷也会随着移动,用这种方式对运动物体进行连续的成像输出。而我们多行线阵相机就是基于该方式,对物体同一区域进行拍照,每一行被光子激发的电子都叠加到下一行,经过多次叠加,最后一行的图像亮度就足够了,从而保持高灵敏度、高信噪比、高速性能、适用低光环境等优势。但因为该工作特性,TDI相机要求物体的移动速度与相机的行扫描速度严格同步。如果二者不同步,图像将会由于积分叠加原因导致模糊化。[2]在多数线扫相机如viewworks相机、埃科相机等,由于TDI技术决定性作用为相机芯片,故触发设置上仅需按照正常行触发并在软件中设置TDI模式即可。对应vieworks线扫相机设置处可同时设置TDI和Area模式,当工作模式为TDI模式时,相机为时序积分模式;当工作模式设置为Area时,相机为面阵模式,此时相机可视为 诸如 17824*256靶面的面阵相机。
分时频闪,是一种特殊的线阵扫描方式。区别于传统线阵扫描的恒定照明方式,分时频闪控制器在线阵相机每采集一行图像时切换光源的种类或亮度,使得多种光源成像有序地间隔排列在图像中。在采集完成后对原始图像进行拆分重组,即可在一次扫描中获得多种光源效果图像,从而降低成本,提高兼容性,获得最佳成像效果。分时频闪效果如图2所示:
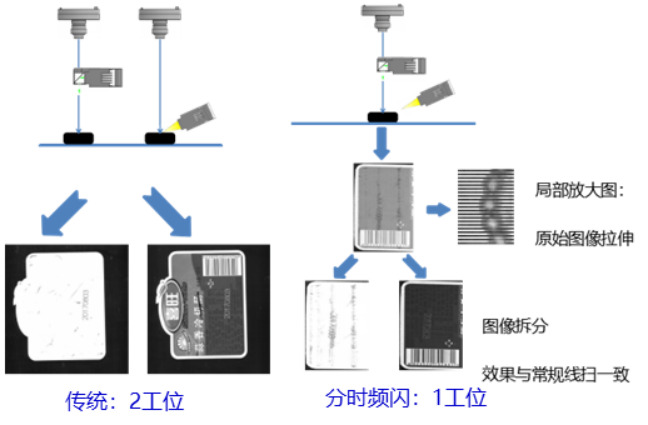
具体实现可例如:机台端编码器信号A Hz同时给相机端与光源控制器端。在相机内部进行4倍频采集处理。光源控制器接四种不同光源,第一种光源接收到信号之后开始点亮,第二个光源接收到信号之后延迟 A/4 后开始点亮,第三种光源延迟A/2 后开始点亮,第四种光源 延迟3A/4后开始点亮。相机端曝光时间 Exposure Time <= A/4,每个光源点亮时间 Light Active <Exposure Time。这样最后得到一副以四为周期图片进行拆分即可得到四种光源环境下拍摄的图片。[3]
长短曝光HDR技术,即高动态范围,不同曝光拍照成像后,图片合成并进行累计,欠曝的图像区域在长曝光下亮度提升,过曝的图像区域在短曝光下亮度减弱,合成图像后即可保留不同区域的光照敏感变化,使各个区域都能清晰成像,从而提高拍摄的精度,并避免不同材质和重叠下的影响。[4]此种技术可通过例如 奇数行进行短曝光,偶数行进行长曝光,利用行触发模式加以实现,最终通过软件合成我们需求的图像。

另外在使用外触发模式时,若参数不合适,图像会被拉伸或压缩,其对应本质为横向精度与纵向精度不匹配导致。调节计算公式如下:
横向精度=相机视野/相机分辨率
纵向精度=编码器转动一圈对应的实际平台运动距离/(编码器一圈输出的脉冲个数*倍频系数/4/分频系数)
注:编码器一圈输出的脉冲个数指编码器转动一圈AB相一起的总脉冲。
当横向精度与纵向精度相等时,图像无拉伸或压缩变形。
对应dalsa相机分倍频调节位置与埃科相机调节位置如图4所示。

参考文献:
[1] https://blog.csdn.net/qq_41810539/article/details/134980092
[2] https://blog.csdn.net/weixin_42577742/article/details/132355460
[3] https://www.cnblogs.com/Super-Caption/p/16446071.html
[4] https://blog.csdn.net/yellow_hill/article/details/124574685








